欢迎光临~北京正印科技有限公司 服务电话:400-886-3881
语言选择:
 ∷
∷

∷
∷






Imatest的几何标定方案参与了Mobileye方案中几何校准的标准、要求和方案,是目前市场上较为成熟和的几何标定方案
此标定方案是一种基于实际论证做参数评估的例子,评估的参数是设备在每次获取图片中的内参和外参。实际论证是测试图片中检测一系列的特征点位(比如:棋盘格的角落),基于这些特征点位,我们将其与真实世界的结构联系起来。参数评估的规模就是评估数据的总数,对于空间相机系统来说,通常在20-30个。实际论证用到的特征点位可能成千上百中点的形式出现在多幅图像中。
此标定方案是一种基于实际论证做参数评估的例子,评估的参数是设备在每次获取图片中的内参和外参。实际论证是测试图片中检测一系列的特征点位(比如:棋盘格的角落),基于这些特征点位,我们将其与真实世界的结构联系起来。参数评估的规模就是评估数据的总数,对于空间相机系统来说,通常在20-30个。实际论证用到的特征点位可能成千上百中点的形式出现在多幅图像中。
什么是摄像头几何标定?
图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立摄像机成像的几何模型,这些几何模型参数就是摄像机参数。
所以,几何标定是摄像头图像在平面上的(2D)点与摄像头所拍摄的现实场景中的(3D)点之间关系所需参数的过程
该方案它结合了生产线上快速测试所需的分析软件和标定软件;可以针对您的特定摄像头优化每种测试设置,并使整个系统可实现摄像头的自动控制及标定。且已经成功地为视场在28°~200°之间的摄像头制定了高兼容性的解决方案,FOV最大可以支持到200°是目前市场上少数超过180°的标定校准方案设备。
参数评估
- 内参
这些参数代表了系统中要做空间映射相机的内参,他们是要被测试评估的,其中包括:
· EFL
· skew
· alpha
· principle point(x,y)
· distortion center(x,y)
· distortion model coefficients
通常情况下,我们不做skew和alpha评估并假定他们是固定的。这与传感器在二维空间(X和Y)上的像素间隔相同的原理是一直的,并且这些维度是垂直的。如果其中的一个或两个不能很好展示sensor,那需要做参数标定。
- 外参
在做相机的流程中,对于每个测试位置在做内场标定的同时会连带着评估外参。为系统中的每个摄像头返回以下参数:
· translationrelative to reference device(3-vector)
· rotationrelative to reference device(3x3 matrix)
此外,测试设备在每个测试位置的姿势也会被记录评估,返回到系统中。通过组合相对参考姿态,可以重建每个相机每次拍摄的姿态。
为什么要使用此标定系统?
1. 避免人为失误和降低时间成本
2. 提高速度,保证精度和空间利用率
3. 高精度测试产品,为安全驾驶护航
主要特点:
· 计算内参、外参和畸变
· 可测试单目和多目摄像头
· 可在最小焦距范围内的自由空间测试
· 测试时间短(30-90秒)
· 可自动化测试
· 集成软件分析和标定
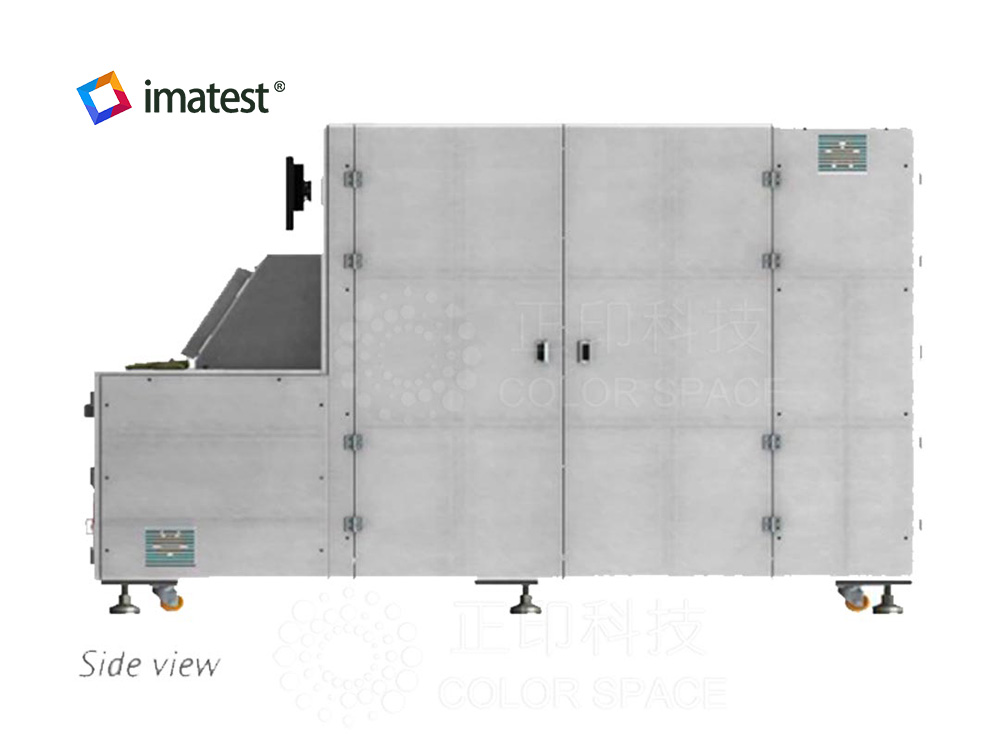
设备信息
△ 以上尺寸是预期的最大尺寸。实际大小会有所不同这取决于系统要求。
长
宽
高
设备尺寸
最长可达254 CM
最宽可达254 CM
最高可达198CM

实际产品图示例

相关阅读:几何相机标定的校准验证方法
【实验室预约】更多相关产品及测试服务的信息,请联系:sales@colorspace.com.cn

扫码关注【正印科技】随时随地了解行业新资讯/活动/解决方案







